About
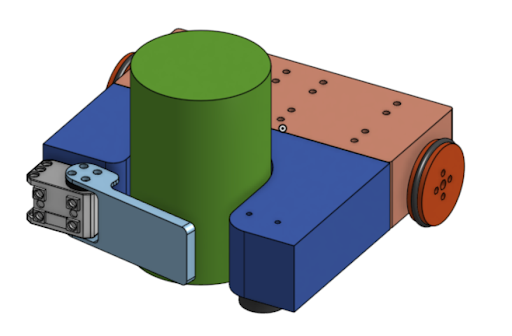
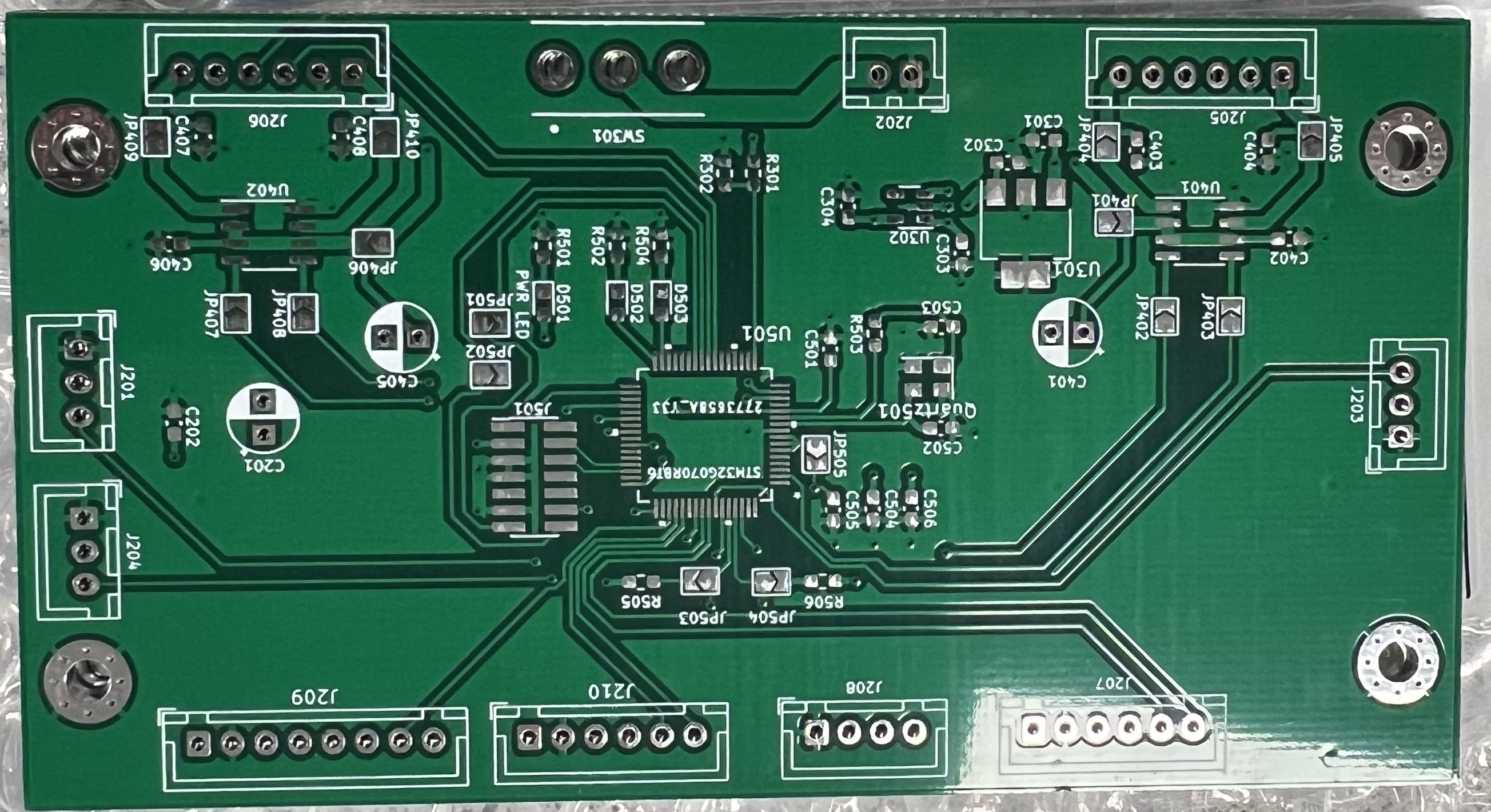
We participated in a 3-month school challenge aimed at developing a robot capable of collecting empty cans from a table and placing them in a specific area. To accomplish this, we undertook a number of tasks including 3D printing the robot’s structure, creating the PCB, integrating sensors, developing firmware using FreeRTOS, and integrating all components. To achieve the high-level task of picking up and moving the cans, we utilized reinforcement learning and trained a neural network using a combination of X-Cube-AI and Unity3D ml-agent package.
Training
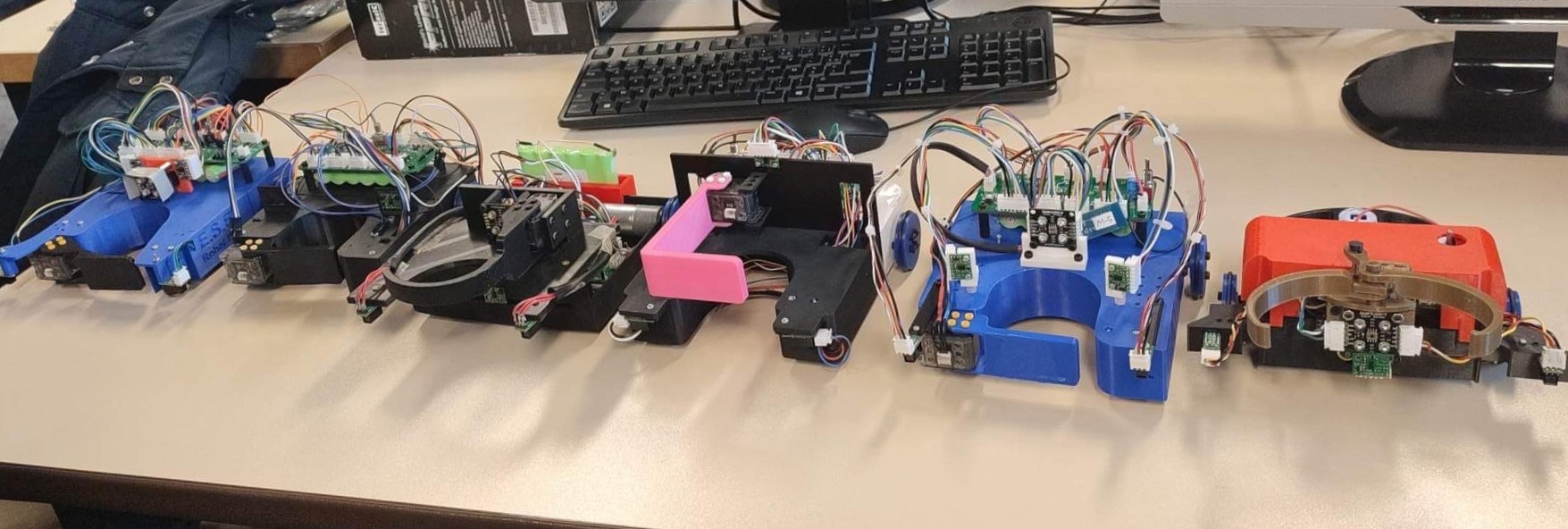
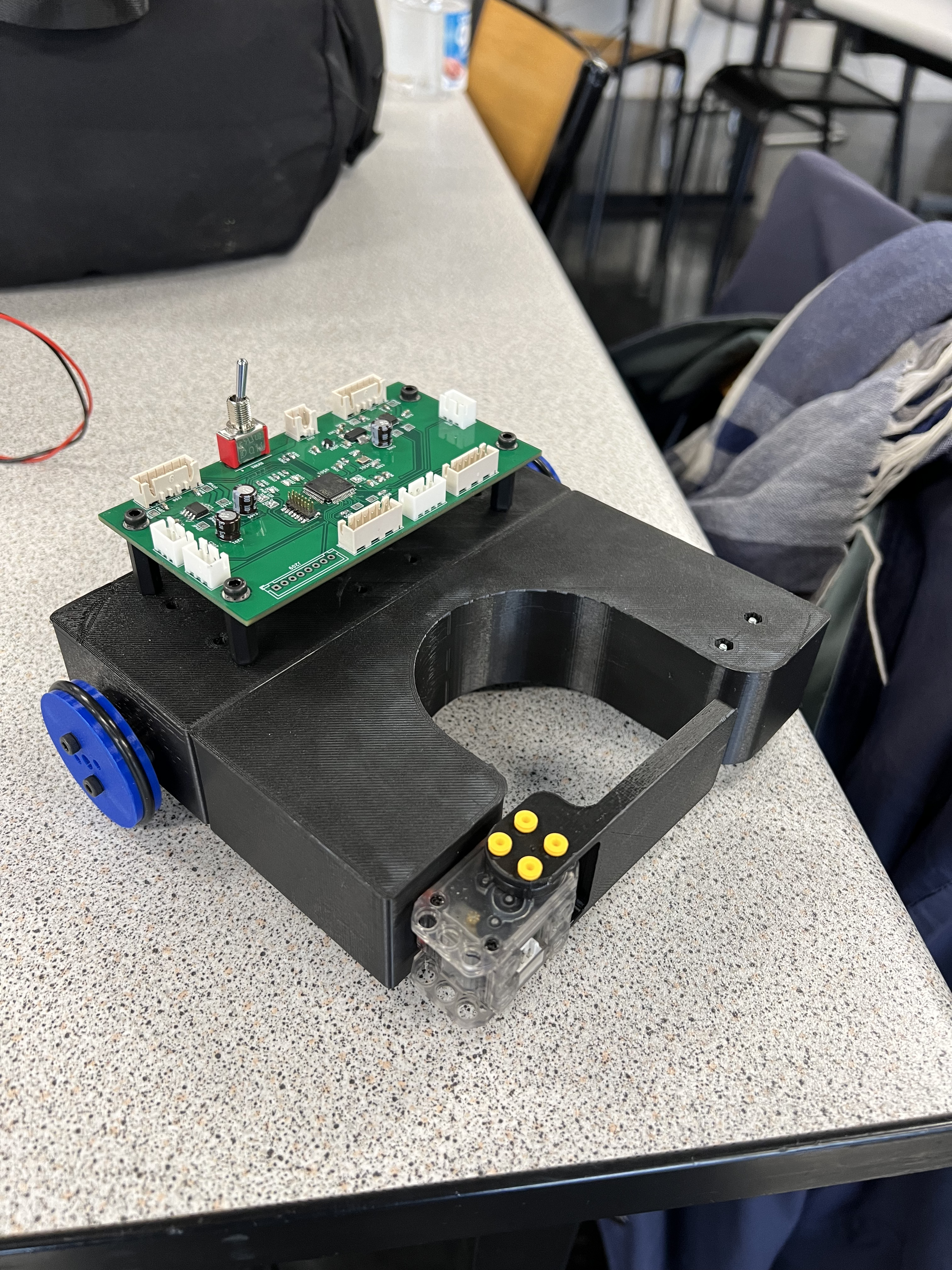
Gallery