Context
Completed as a final 3 weeks project for : CS 7630 Autonomous robotics @ GaTech Europe.
Scenario
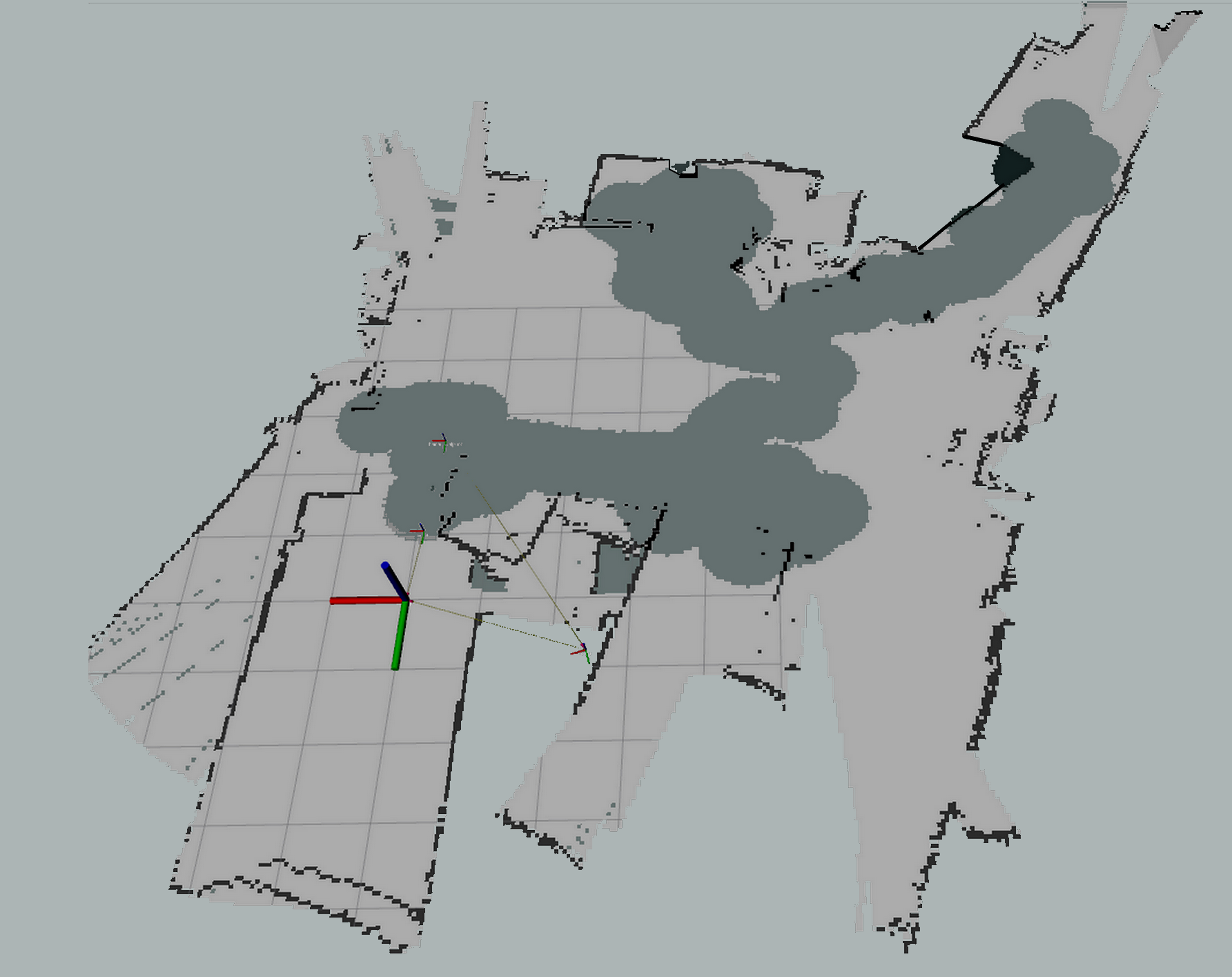
In this project, we used a TurtleBot, ROS packages, and CoppeliaSim to accomplish the task of localizing the robot and mapping the WiFi signal level of the first floor of our university. Our main objective was to integrate all packages developed during the course, which included:
- Localization with odometry
- Mapping using TurtleBot’s Kinect point cloud
- Implementing A* / Dijkstra algorithm to find paths for exploration and obstacle avoidance
- Joystick commands and obstacle prevention based on laser obstacle distances
- Utilizing the autodock package from the TurtleBot repository
Steps
- 1 Undocking
- 2 Exploring
- 3 Publishing signal map